Humanoid Human-ish Robots for Everyone
Our vision is to build, train, and deploy millions of cost-effective general purpose robots across industries like manufacturing, data centers, hospitality, and eventually the home.
We are a team of Stanford and MIT roboticists with experience at companies including Google, Toyota, Tesla, and unicorn robotics startups. Instead of assuming robots need human-like hands to do human work, we start with the work itself, then co-design the data collection system and robot hardware around those tasks. This approach lets us eliminate arbitrary design constraints and build robots 10-20x cheaper than the typical humanoid with equal capability on the tasks that matter.
Robots learn from human demonstrations. The key to scaling high quality training data is to collect demonstrations from real workers doing real jobs with sensorized wearables. Our tactile glove and camera system capture data from real tasks like soldering, cable harness wrapping, part assembly, chain servicing, and much, much more.

The glove records motion, video, and tactile force data, so our robots learn not just where to move, but how hard to press, grip, pull, and respond to contact.
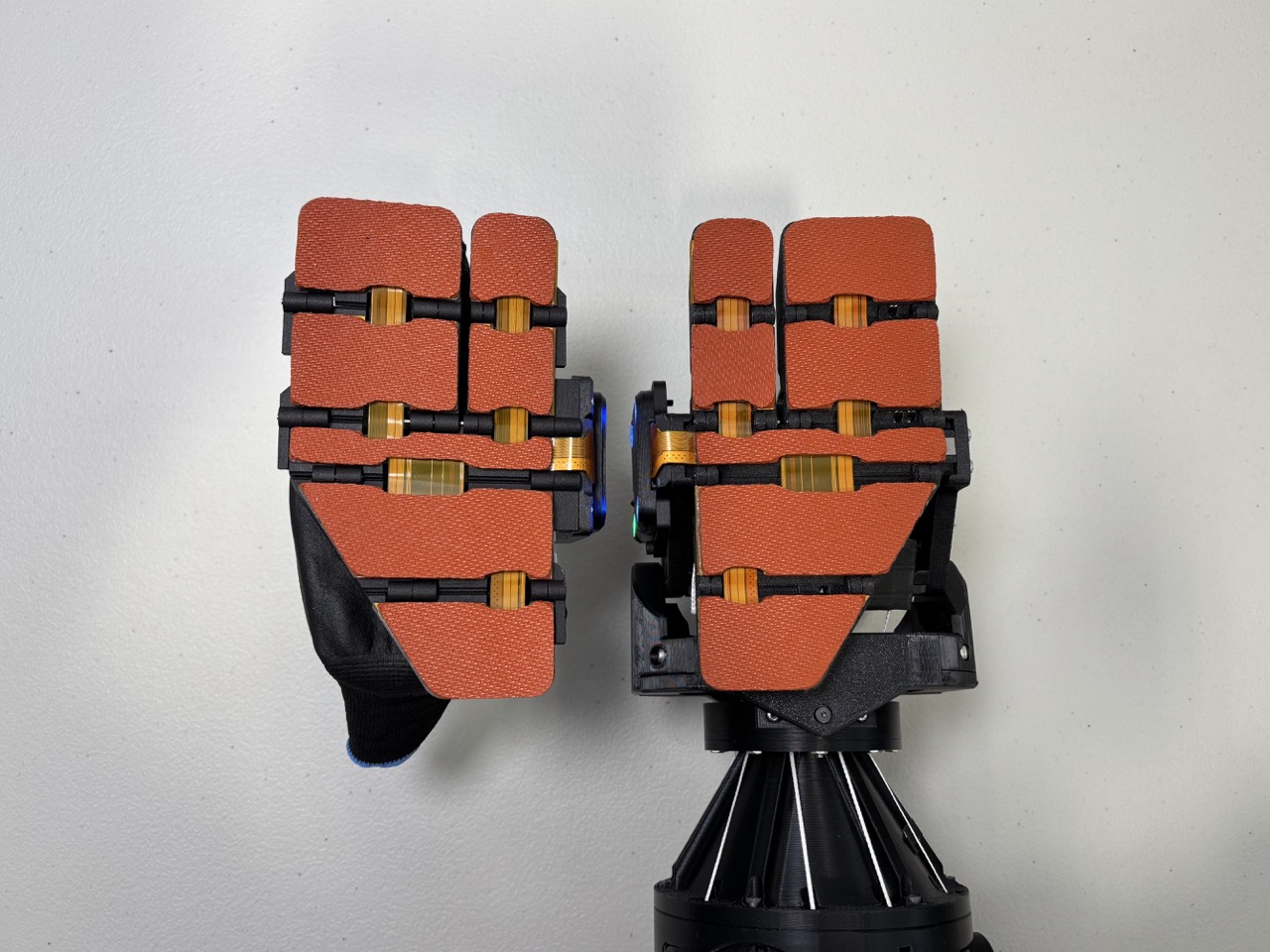
Our robot hand is co-designed with the glove. They share matching geometry, kinematics, and sensing, which means the data we collect transfers directly into high-quality robot training data with minimal embodiment gap.
We integrate these hands into fully custom mobile robots, like our robot Sid shown above, to turn real-world human demonstrations into useful robotic skills. This full-stack approach lets us collect better data, train fluently without remapping, and deploy robots into practical commercial environments.
This is just the beginning. We are building toward a future where capable, affordable robots can help with the physical work that powers the world.
Get in touch! nathan@dreamrobotics.tech